Simulator-Based Driving Training in Low-Speed Maneuvering for Swedish Police Students
Senior lecturer, Department of Police Work, Malmö University
Corresponding author
Associate professor, Department of Police Works, Malmö University
Publisert 19.12.2022, Nordic Journal of Studies in Policing 2022/1, side 1-13
Driving simulators are a common tool for researching and practicing driver behaviors. Despite this, research on the use of driving simulators within the basic police training in Nordic countries is sparse. Therefore, the purpose of this quasi-experimental study was to evaluate and compare studentsʼ driving ability regarding low-speed maneuvering in tight spaces, during a limited part of their education, based on the type of training (simulator only, courtyard only, or 50/50) they receive. 83 Swedish police students, divided into four classes, attending their second semester at the police program, participated in the study. These four classes were divided into three different experimental groups. The simulation group (two classes, n = 41) only practiced driving using a driving simulator. The 50/50 group (one class, n = 22) practiced driving a vehicle in the courtyard and in the simulator. The courtyard group (one class, n = 20) only practiced driving a vehicle in a courtyard. The results showed that there were no statistically significant differences between type of training and performance on the examination regarding low-speed maneuvering in tight spaces. The findings are discussed in terms of their implications for the use of driving simulators in higher education, more specifically in police basic training programs.
Keywords
- Driving simulation
- police education
- law enforcement
- quasi-experimental design
1. Introduction
Simulation-based training is increasingly being used in vocational education and training as well as in higher education settings. Simulations are a valuable means of allowing students to practice handling complex situations in a safe environment and sometimes constitute the only way to offer students the opportunity to practice some aspects of their education. Simulators, i.e., the media used to experience the simulation, have an established place in pilot training, medical training and to some extent in driving license training. The most common arguments for simulator-based training are that it allows students in different professional areas to practice in uncommon or unsafe situations or tasks in a safe environment without risking harming themselves or a third party (Rystedt, 2009). One such risky environment, or professional task, that could potentially benefit from simulator-based training is driving a police car. In Sweden, during the five-year period 2015–2020, three police officers were killed and 450 were seriously injured while driving on duty (Kammarkollegiet, 2021). This makes driving one of the most dangerous aspects of police work.
The police profession requires police students and police officers to be able to handle a car in complex (traffic) situations. However, many of these situations are not possible to practice and prepare for without taking unnecessary risks. Another benefit of simulator training is that while those with a greater need for practical practice can be given more opportunities to train, the number of hours students use the vehicles is reduced and thereby emissions are reduced as well, thus contributing to sustainable development. Drawing from experiences from other areas where vehicles are used, there appears to be potential for simulation-based driving training to be successful in police training as it offers a risk-free environment to practice complex and potentially dangerous situations. As of today, there is, however, a lack of knowledge about the usability of simulation-based driving training in police education.
The Swedish basic training program for police officers includes learning to drive a police car in accordance with current traffic legislation, safely, cost-effectively, and risk-consciously in varying traffic environments. This part of the police education is divided into three steps. The first step in the Swedish policeʼs national driver education takes place at the basic training program and consists of lectures in classrooms, watching video of various police interventions, as well as low-speed maneuvering, city, and other on-the-road skill training. The subsequent two steps take place under the auspices of the Swedish Police Authority, partly under the six monthsʼ paid workplace practice (step 2), but also when they are hired as a police assistant (step 3). In step 2, students train more specifically to drive in a complicated traffic environment and on varying surfaces. In step 3, elements such as driving in the dark/poor visibility are added, but above all the focus is on urgent performance of duties/emergency driving. The need for the Swedish policeʼs national driver education is based on building competence to operate the police vehicles in as effective and secure a way as possible, and all three steps of the driving education are learned through theoretical studies combined with practical driving. This type of conventional training has, according to previous research, proven to be partly (time)inefficient and has not contributed to increased road safety (Christie, 2001; Peck, 2011). Results from a study by Lundälv et al. (2010) on incidents involving police cars in the second-largest county in Sweden during the years 1998–2007 show an increase in accidents over time and that half of the accidents occurred during emergency service driving and the other half during regular police driving or educational driving. Furthermore, the material costs in the form of repairing police cars are increasing annually in Sweden (Kammarkollegiet, 2021), a cost that amounted to almost SEK 100 million in 2020.
Knowledge about oneʼs driving abilities and about oneʼs own limitations as well as those of the vehicle are important in the profession, especially as this can cost the lives of both police officers and civilians (Zahabi et al., 2020). However, training to drive a car in many different circumstances (weather, heavy traffic, obstacles, speeds, different road conditions and different distractions) is an administrative and logistical impossibility.
There are many different driving simulators, but most are not (yet) comparable (visually, tactile, kinesthetic, etc.) to authentic driving, as the lack of G-force, acceleration, and deceleration makes it feel less realistic (de Winter et al., 2012). There is therefore, according to de Winter et al. (2012), a risk that the peopleʼs driving behavior during a simulation is not representative their actual driving. How well a simulator replicates reality is described as the degree of fidelity. According to Kaptein et al. (1996), low-fidelity simulations have a single Personal Computer (PC) monitor, simplified vehicle controls (e.g., steering wheel, pedals) and a fixed base that do not simulate motion. Mid-fidelity simulations typically consist of a large projection screen with realistic cab and vehicle controls that provide a simple motion base. High-fidelity simulations typically provide close to a 360° field of view, a realistic cab and vehicle controls, and simulate realistic motions. Although most descriptions of simulator fidelity emphasize the fidelity of the physical construction or hardware, many other domains can be considered, including task fidelity, perceptual fidelity, behavioral fidelity, psychological fidelity, functional fidelity, motion fidelity, objective fidelity, and concrete fidelity (de Winter et al., 2007; Goode et al., 2013; Wynne et al., 2019). In addition, the fidelity of a simulator and its impact on transfer could depend on the degree of expertise the student has (Alessi, 1988). Despite the above-mentioned limitations, driving simulators can create opportunities for police students to practice, in a safe and controllable way, driving an emergency vehicle in different conditions. The use of driving simulators regarding training skills linked to driving has also shown several positive outcomes linked, for example, to increased traffic awareness among young drivers (Pradhan et al., 2006) and older driversʼ spatial attention (Roenker et al., 2003). Research on the use of simulators in emergency vehicle driver training is limited. Hembroff et al. (2018) studied 156 Canadian law enforcement studentsʼ driving behavior in simulators with the purpose of evaluating their performance while dual tasking, i.e., driving while using cell phones. Results showed that the simulator-based training was useful as it provided police students with skills in handling dual tasks, such as maintaining driving performance while communicating. However, this was not maintained under increased realism and danger, which justifies more training where students are exposed to an increase in cognitive load and signals a need for more studies in the field.
Part of the Swedish policeʼs national driver education has a learning objective specifically related to low-speed maneuvering in tight spaces. Research studying the use of simulators to practice low-speed maneuvering is sparse and mainly focuses on simulation discomfort (Bertollini et al., 2014). If using a driving simulator in driver education, it is important that the skills learned via the simulator can be transferred to actual driving and that the performance data that can be extracted from the software has some predictive significance for future driving behavior (de Winter et al., 2009; Roscoe & Williges, 1980). Using simulators (if this could be assumed to be an equivalent learning activity to achieve a certain learning objective in police education) could increase teaching and practice opportunities (mass training); generate more individual feedback (pedagogical effect) on certain aspects of driving; and provide the opportunity to gradually increase the cognitive load (dual tasking such as communicating via radio, using GPS, etc.) in a safe environment (e.g., Gustavsson et al., 2020; Zahabi et al., 2021). Furthermore, researchers and instructors could gain increased knowledge about simulator-based training as a pedagogical tool, which could possibly lead to the development of police education in general and reduce the emissions this learning activity generates daily, one of Swedenʼs 16 environmental quality objectives in relation to Agenda 2030 (Naturvårdsverket, 2021).
Based on the above, simulator-based driver training could be a safe, adaptable, and resource-saving form of learning that contributes to more practical training in complex situations in a sustainable way. Therefore, the purpose of this quasi-experimental study is to evaluate and compare studentsʼ driving ability regarding low-speed maneuvering in tight spaces, during a limited part of their education, based on the type of training (simulator only, courtyard only, or 50/50) they receive. This is to gain knowledge of the effect of different learning activities and, in the long run, to develop driver education in the basic training program for police officers and further contribute to evidence-based education of police officers. To our knowledge, this is the first time simulator-based training has been used in a Nordic setting to teach police students how to maneuver a police car and thus also the first time outcomes on practical examination, i.e., the transferability of simulated learning to authentic driving, has been evaluated based on the training method.
2. Method
2.1 Participants and procedure
83 Swedish police students, divided into four classes, attending their second semester at the police program, participated in the study. Students were divided into classes of approximately 24 students upon admission. The sorting was based on the alphabetical order of surnames. However, some adjustments were made to achieve an even distribution of female students since they are often underrepresented. The aim was to have an equal number of female students in each class. The four classes in this study were divided alphabetically into three experimental groups. Class A were assigned to the courtyard group, class B to the 50/50 group, and classes C and D to the simulation group. The simulation group (two classes, n = 41) only practiced driving in simulated environments using a driving simulator. The 50/50 group (one class, n = 22) practiced both authentic driving in a courtyard and in the simulator. The courtyard group (one class, n = 20) only practiced authentic driving in a courtyard. Common to all groups was the first four-hour theoretical lecture. Following the first lecture, the experimental setup differed depending on the group (see Table 1 for experimental setup). All groups had three instructors with them on every occasion. All participants signed an Informed Consent Form before being allowed to participate in this study. On the second occasion, all participants also filled out a socio-demographic form, which collected the participantsʼ age, gender (male, female, do not want to mention), years of driving experience, and average driving per week (0–3h/week or more than 3h/week). For more information, see Table 2 for the socio-demographic characteristics of the participants.
Table 1
| Group belonging | Courtyard (n = 20) | 50/50 (n = 22) | Simulation (n = 41) |
| Lecture 1 | 4h theory | 4h theory | 4h theory |
| Lecture 2 | 4h (1h theory, 1h gathering/assemble/disassemble, 2h driving the police car through the obstacle course on the courtyard), approximately 1 hour per student in the driving seat. | 4h (1h theory, 3h simulation driving using all three exercises in Skillster), approximately 1 1/2 hour per student in the simulator. | 4h (1h theory, 3h simulation driving using all three exercises in Skillster), approximately 1 1/2 hour per student in the simulator. |
| Lecture 3 | 4h (1h theory, 1h gathering/assemble/disassemble, 2h driving the police car through the obstacle course on the courtyard), approximately 1 hour per student in the driving seat. | 4h (1h theory, 1h gathering/assemble/disassemble, 2h driving the police car through the obstacle course on the courtyard), approximately 1 hour per student in the driving seat. | 4h (1h theory, 3h simulation driving mass training only using the third exercise, the examination simulation), approximately 1 1/2 hour per student in the simulator. |
| Examination | Courtyard examination on the obstacle course (see Figure 5 and 6) | ||
The simulation room where students practice driving in simulators consists of six stations, all equipped with three 32” (16x9) curved 4K screens, steering wheel, and pedals (see Figure 1). The three screens provide a front view and two side views for the driver (the visual field is approximately 180°). The simulation software used was Skillster. More specifically, three exercises/scenarios in Skillster were used. In the first exercise, students practiced maneuvering in tight situations (see Figure 2). In the second exercise, they practiced backward maneuvering in tight situations (see Figure 3), and in the third, the examination simulation, the students practiced in advanced maneuvering paths (see Figure 4). A drone image (see Figure 5) and videos of the examination setup in the courtyard were sent to Skillster so that they could create a similar scenario in the simulator by all measures necessary (e.g., overall length and width of courtyard, length and width between obstacles). Therefore, the scenario in the third exercise is a simulated replica of the setup for the courtyard examination.

Figure 1
Three-monitor simulator configuration with steering wheel and pedals

Figure 2
Shown is the simulation exercise where students practised maneuvering in tight situations.

Figure 3
Shown is the simulation exercise where students practised backward maneuvering in tight situations.

Figure 4
Shown is the simulation exercise where students practised in advanced maneuvering paths similar to the courtyard examination.
The examination (occasion 4) consisted of driving through an obstacle course (see Figure 5 and 6). In order to pass the exam and fulfil one of the course specific learning objectives, to drive the car in accordance with current traffic legislation, safely, cost-effectively and risk-consciously in varying traffic environments, especially during low-speed maneuvering in tight spaces, there must be a flow to the driving. During the examination, the car is not allowed to touch any of the sticks (the foot of the sticks does not count). In the event of a collision, the student gets another attempt at that obstacle, but only one such attempt on the whole round, otherwise they fail the exam. During the zigzag (both forward and reverse), students are not even allowed to drive on the foot of the sticks (see 3 and 4 on Figure 6). One retake is allowed at “Parallel parking” (see 1 on Figure 6), one retake is allowed at “The pocket” (Swedish: Öresundsfickan, see 2 on Figure 6), and one retake is allowed on “The scissor” (Swedish: Saxen see 6 on Figure 6). Three instructors with a minimum experience of 12 years as an authorized driving instructor examined the students. A pass or fail at the examination is also the outcome measure.

Figure 5
Drone image of examination setup
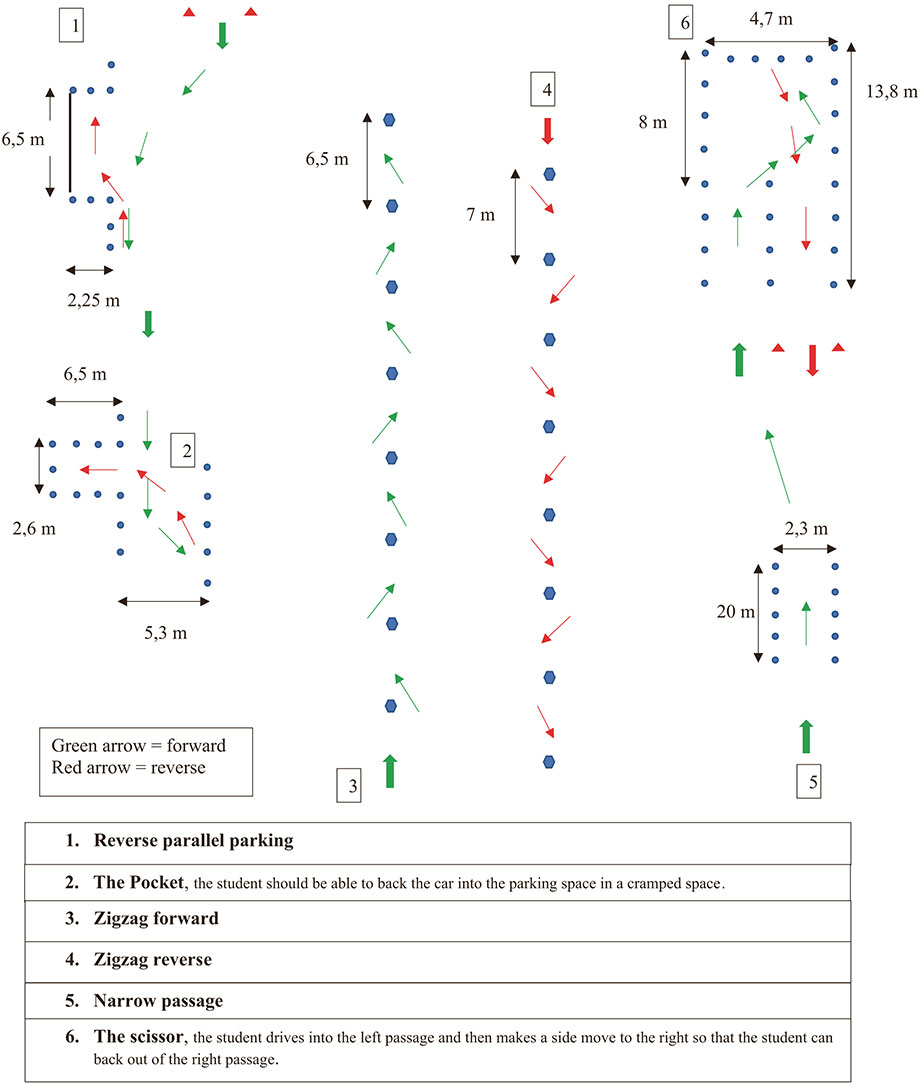
Figure 6
Illustration of examination setup
2.2 Analytical strategy
Statistical analysis was performed using IBM SPSS Statistics (version 27). We began with a descriptive analysis of the participants and the similarities and differences between the classes assigned to the different groups. In the next step we compared the outcome, namely the results on the practical exam, between the groups. One-way ANOVA was used to compare means in driving experience. Based on the small sample size, categorical variables were compared using Fischerʼs exact test (2x2) and the Fisher-Freeman-Halter exact test (3x2). A p-value of 0.05 was considered statistically significant.
3. Results
The sample consisted of male (63.9%) and female (36.1%) police students. On average, the sample had a driving experience of 7.28 years (SD = 5.98).
To ensure that any results could not be explained by differences in the distribution of men, women, persons of different ages, differences in driving experience, and differences in average time of driving per week, we tested for differences in socio-demographic composition in the groups.
The mean (SD) age was 26.41 (5.64). The different proportions of males and females in the different groups were not statistically significant (p = .580). Furthermore, a one-way ANOVA revealed that there was not a statistically significant difference in mean age between the three groups (F(2, 80) = [.786], p = .459).
A one-way ANOVA revealed that there was not a statistically significant difference in driving experience between the three groups (F(2, 80) = [1.974], p = .146). Furthermore, there was no difference between the groups regarding average driving time per week (p = .826).
Four students (2 females, 2 males) from the courtyard group (20%), four students (3 females, 1 male) from the 50/50 group (18%), and two students (males only) from the simulation group (5%) failed the exam. The result from the Fisher-Freeman-Halter exact test showed that there was no statistically significant association between the types of driving practice the students had been offered and whether they passed or failed the exam (p = .119). This suggests that simulation-based training using a simulator with low fidelity is an efficient pedagogical tool in basic driving training for police students.
Table 2
| Group belonging | ||||
| Total (N = 83) | Courtyard (n = 20) | 50/50 (n = 22) | Simulation (n = 41) | |
| M Age (SD) | 26.41 (5.64) | 27.75 (6.46) | 26.27 (5.98) | 25.83 (5.03) |
| Male (%) | 53 (63.9%) | 14 (70.0%) | 12 (54.5%) | 27 (65.9%) |
| Female (%) | 30 (36.1%) | 6 (30.0%) | 10 (45.5%) | 14 (34.1%) |
| M Years Driving experience (SD) | 7.28 (5.98) | 9.55 (7.66) | 6.77 (5.64) | 6.44 (5.02) |
| Average weekly driving | ||||
| 0–3 hours | 56 | 13 | 14 | 29 |
| 3 or more hours | 27 | 7 | 8 | 12 |
| Exam | ||||
| Pass | 73 | 16 | 18 | 39 |
| Fail | 10 | 4 | 4 | 2 |
We also estimated the amount of reduced emissions that can be achieved by switching from driving a vehicle in a courtyard to driving in a simulator.
The students in the simulator group and the 50/50 group drove for a total of 54 hours in the simulator, reducing CO2 (kg) emissions by 797 kilograms and furthermore saving 296 liters of fuel, according to the calculation made by the software in Skillster. From a wider perspective, a move from courtyard driving to simulator driving has the potential to reduce emissions significantly if implemented more widely.
4. Discussion
The results showed that there were no statistically significant differences between type of training and performance on the examination regarding low-speed maneuvering in tight spaces. This can be interpreted as meaning that it does not matter whether students only practice in a simulator, 50/50, or only authentic driving: the outcome regarding driving skills will be the same. Since the group affiliation and the training carried out in the specific group could not explain the outcome of the examination, other possible explanations could be the studentsʼ previous driving experience and time spent using a car during a normal week. However, there were no statistically significant differences between the groups regarding driving experience, time spent using a car during a week, age, and gender. Therefore, we did not investigate this further.
One reason why simulator training can have an impact on performance can be traced to the simulatorʼs fidelity in relation to the studentsʼ competence level. If the competence level is low, the degree of fidelity does not have to be high for learning to take place. Furthermore, a small increase in fidelity is enough for learning to increase further (Alessi, 1998). The simulator used in this study could according to Kaptein et al. (1996) and Wynne et al. (2019) be classified as a low-fidelity driving simulator based on the fact that it only covers a range of 180 degrees, has no motion base, and has no realistic steering wheel and pedals. Limited fidelity of a simulator is generally considered as a drawback compared to driver training on the roads. Nevertheless, it has been reported that further developments in driving simulators should not necessarily be aimed at increasing fidelity but at the improvement of didactics and courseware instead (Gustavsson et al., 2020). One aspect to consider regarding this is the different groupsʼ training, partly the actual training time the students received within the scheduled time but also pedagogical aspects, such as proximity to instructors, opportunity to ask questions and get constructive feedback up close. The scheduled time for each lesson was four hours, but in practice this differed depending on whether the students belonged to the courtyard group or received their training in a simulator. For the courtyard group, the actual time was only two hours of driving (one hour per student as they drove in pairs, taking turns driving the vehicle). This is partly because it takes time for the students and teachers to drive the cars back and forth between the police academy and the courtyard and to pack up all materials used within the scheduled time. For the students in the simulator group, “unnecessary time” does not disappear for things like this; they can start as soon as the lesson time begins and therefore also have more time to train during the scheduled time. Furthermore, there is also another opportunity for teachers to give direct feedback in close connection to the studentsʼ runs in the simulator. According to previous research (e.g., de Winter et al., 2012), having the opportunity to give direct feedback in close connection with what is being practiced is an advantage of using simulators.
The simulator exercise can be considered as a resource that interacts with other forms of teaching, incentives, and subject integration (i.e., combining two or more subjects when teaching a topic). It is the professional knowledge that is central and one that takes time to develop. The teachersʼ experience of previous professional activities and teaching can potentially help students to discern how the simulators can support the transition to driving in police cars. The teachers then create support structures that interact with the simulatorsʼ exercises to make visible the aspects that are central to the handling of the police car and to engage students in their knowledge development. The simulators continuously generate data that can form the basis for analysis, feedback, and assessment of each studentʼs knowledge development. As an example, the simulator produces different colored lines representing when the student uses the brakes or increases speed. In this way, a studentʼs driving behavior can be traced and analyzed. Although a simulator can generate a lot of data that could be used for feedback, this is not always the case. A study by Gustavsson et al. (2020) found that the vocational teachersʼ pedagogical knowledge when driving with authentic vehicles could not be automatically transferred to simulator-assisted teaching. Vocational teachers and students need to develop (new) knowledge in reflecting on and using data that is generated by the simulators. The simulator thus creates opportunities but also requires sound choices and strategies for teaching overall. It will therefore be a challenge for police officers and instructors to master the tool so that it serves its purpose in a didactic and pedagogical manner.
Another aspect regarding the results of the study is that since part of the teaching was conducted with the help of simulators this also saved 296 liters of fuel. Furthermore, by using simulators CO2 emissions were reduced by 797 kg. This study only included four classes in one semester, in relation to one learning objective, at one specific university. However, if all higher education institutions in Sweden that conduct police education used the type of simulation described in this article, it would contribute toward achieving Swedenʼs environmental quality objectives (Naturvårdsverket, 2021), where both the use of fossil fuels and emissions play a role. Furthermore, it would also save a great deal of money, as costs for fuel and wear and tear on cars are extensive.
The current study is not without limitations, and therefore the findings must be interpreted with caution. An important aspect of experimental studies is randomization, and in this study there was no randomization regarding the individual participants. Another approach used in experimental studies is to create similar groups which are then exposed to different interventions (or control). In this study, it was not checked whether the different groups were represented by similar individuals in terms of age, gender, and driving experience. However, the results did not show any statistically significant differences between the groups regarding the above-mentioned factors, which indicates relatively homogeneous groups and therefore provides an interesting basis for comparison relative to the type of education they received (see Table 2). Another limitation with a quasi-experimental design like the one used in this study is the ability to control for confounding during the study period. It is possible that students, especially those within the simulation group, practiced on their own out of worry that they would otherwise fail the exam. Students were provided with instructions on how to maneuver the vehicle in the courtyard to give them the possibility to practice on their own. We did not control for this and therefore cannot say for certain that it has not affected the results. However, no student asked to borrow specific equipment to set up the courtyard, and we did not get any information from the students that they had practiced on their own. Another limitation is that teachersʼ didactical decisions and studentsʼ perceptions of the learning climate were not taken into consideration. This is something that could play an important role in studentsʼ achieving the learning objectives and needs to be studied further. In relation to this, another limitation is that the instructorsʼ work environment was not taken under consideration. There is potentially a difference between having a lecture in a warm classroom and being out in cold and windy weather on a courtyard. This could potentially – consciously or unconsciously – affect teachersʼ ability to maintain a good learning climate and is a possible factor to include in future studies.
Although using driving simulation in police basic training needs to be studied further, the results of this study would strengthen the motives for part of the teaching to take place using driving simulators without risking the quality of the education. It could even be the case that the benefits outweigh the risks. In addition to having an equivalent outcome with respect to whether the students achieved the learning objective, it could also improve the work environment, increase availability of driving instructors and feedback to students, reduce emissions, and save money on fuel. More research is needed, not only on low-speed maneuvering in tight spaces but also in other areas of police driver training. More specifically, it would have been interesting to investigate how simulator-based driving training can function as a complement to on-the-road driver training (the following semesters at the police academy) where police students must show a different type of risk awareness and decision-making in driving the police car.
One aspect to be considered is the skepticism that this project initially received from both teachers and students. The expectations of simulator-based training were generally low, and on rare occasions protest or negative attitudes and comments from students interfered with the lesson plan, almost leading to an ending of class. At the end of the project, however, both students and teachers were positive in general, much because of the outcome of the exam.
Other factors to consider are that students may not take this type of training seriously but treat it as a game. According to Fu-Hsing et al. (2013) digital simulation and its design as a game means that the student tends to focus on the game (in terms of being in the game and coping with its challenges), rather than focusing on the intended knowledge content. In other words, the opportunity to create an “immersive experience” with the student in the simulated environment does not automatically mean that the student comes into contact with, and develops, relevant knowledge. Supporting studentsʼ learning thus becomes a central issue in the work with digital simulation and requires a certain pedagogical approach.
The risk of so-called “simulator sickness,” comparable to motion sickness, should also be considered. Some students experience nausea and are forced to interrupt training. Future studies should consider these factors as well and study simulator-based training in a more holistic manner. We hope that the results from this study can help ease further implementation of simulator-based training in higher education in general and police basic training in particular.
References
-
Alessi, S. M.(1988). Fidelity in the design of instructional simulations.
Journal of Computer-Based Instruction
, 15(2), 40–47. -
Bertollini, G.,Glase, Y.,Szczerba, J., &Wagner, R.(2014). The effect of motion cueing on simulator comfort, perceived realism, and driver performance during low speed turning. In
Proceedings of Driving Simulation Conference, Paris, France
. -
de Winter, J. C.,De Groot, S.,Mulder, M.,Wieringa, P. A.,Dankelman, J., &Mulder, J. A.(2009). Relationships between driving simulator performance and driving test results.
Ergonomics
, 52(2), 137-153. https://doi.org/10.1080/00140130802277521 -
de Winter, J.C.F.,van Leeuwen, P.M., &Happee, R.(2012). Advantages and disadvantages of driving simulators: a discussion. InA. J. Spink,F. Grieco,O. E. Krips,L. W. S. Loijens,L. P. J. J. Noldus, &P. H. Zimmerman(Eds.),
Proceedings of Measuring Behavior 2012, 8th International Conference on Methods and Techniques in Behavioral research
(pp. 47-50).Noldus Information Technology
. -
de Winter, J.C.F.,Wieringa, P.A.,Dankelman, J.,Mulder, M.,van Paassen, M.M., &de Groot, S.(2007). Driving simulator fidelity and training effectiveness. In
Proceedings of the 26th European Annual Conference on Human Decision Making and Manual Control
,Lyngby, Denmark
. -
Fu-Hsing, T.,Charles, K.,Kuo-Hsun, H.,Cheng-Ling, A. C.&I-Ying, H.(2013). The importance and use of targeted content knowledge with scaffolding aid in educational simulation games.
Interactive Learning Environments
, 21(2), 116–128. https://doi.org/10.1080/10494820.2012.705852 -
Goode, N.,Salmon, P. M., &Lenné, M. G.(2013). Simulation-based driver and vehicle crew training: applications, efficacy and future directions.
Applied ergonomics
, 44(3), 435-444. https://doi.org/10.1016/j.apergo.2012.10.007 -
Gustavsson, S.,Dahlberg, G. M., &Berglund, I.(2020). Digitala körsimulatorer i yrkesutbildning: Utmaningar och möjligheter: [Digital driving simulators in vocational education: Challenges and opportunities].
Nordic Journal of Vocational Education and Training
, 10(1), 108-136. https://doi.org/10.3384/njvet.2242-458X.20101108 -
Hembroff, C. C.,Arbuthnott, K. D., &Krätzig, G. P.(2018). Emergency response driver training: Dual-task decrements of dispatch communication.
Transportation research part F: traffic psychology and behaviour
, 59, 222-235. https://doi.org/10.1016/j.trf.2018.08.019 -
Kammarkollegiet, (2021).
Årsredovisning 2020
(Dnr. 2.3.5-2656-21). https://www.kammarkollegiet.se/download/18.55efd74d177741c4fb378708/1614158645682/Årsredovisning%202020.pdf -
Kaptein, N. A.,Theeuwes, J., &van Der Horst, R.(1996). Driving simulator validity: Some considerations.
Transportation research record
, 1550(1), 30-36. https://doi.org/10.1177/0361198196155000105 -
Lundälv, J.,Philipson, C., &Sarre, R.(2010). How do we reduce the risk of deaths and injuries from incidents involving police cars? Understanding injury prevention in the Swedish context.
Police Practice and Research: An International Journal
, 11(5), 437-450. https://doi.org/10.1080/15614263.2010.497333 -
Naturvårdsverket. (2022, March 31).
Sveriges miljömål – Begränsad klimatpåverkan
. [Swedenʼs environmental objectives – Reduced climate impact]. https://www.sverigesmiljomal.se/miljomalen/begransad-klimatpaverkan/ -
Pradhan, A. K.,Fisher, D. L., &Pollatsek, A.(2006). Risk Perception Training for Novice Drivers: Evaluating Duration of Effects of Training on a Driving Simulator.
Transportation Research Record
, 1969(1), 58–64. https://doi.org/10.1177/0361198106196900108 -
Roenker, D. L.,G. M. Cissell,K. K. Ball,V. G. Wadley, andJ. D. Edwards. (2003). “Speed-of-Processing and Driving Simulator Training Result in Improved Driving Performance.” Human Factors:
The Journal of the Human Factors and Ergonomics Society
45 (2): 218–233. https://doi.org/10.1518/hfes.45.2.218.27241 -
Roscoe, S. N., &Williges, B. H.(1980). Measurement of transfer of training.
Aviation psychology. (A 81-15676 04-53) Ames, Iowa State University Press
, 1980, 182-193. -
Rystedt, H.(2009). Simulering: Att återskapa vårdpraktiker som lärande miljöer [Simulation: To recreate health care practices as a learning environment]. InJ. Linderoth(Ed.)
Individ, teknik och lärande [Individual, technology and learning]
(pp. 44–66)Stockholm
:Carlssons
-
Wynne, R. A.,Beanland, V., &Salmon, P. M.(2019). Systematic review of driving simulator validation studies.
Safety science
, 117, 138-151. https://doi.org/10.1016/j.ssci.2019.04.004 -
Zahabi, M.,Nasr, V.,Mohammed Abdul Razak, A.,Patranella, B.,McCanless, L., &Maredia, A.(2021). Effect of secondary tasks on police officer cognitive workload and performance under normal and pursuit driving situations. Human factors:
The Journal of the Human Factors and Ergonomics Society
, 1-14. https://doi.org/10.1177/00187208211010956 -
Zahabi, M.,Park, J.,Razak, A. M. A., &McDonald, A. D.(2020). Adaptive driving simulation-based training: framework, status, and needs.
Theoretical Issues in Ergonomics Science
, 21(5), 537-561. https://doi.org/10.1080/1463922X.2019.1698673